Erkennung basiert auf „Lichtmenge“
Abstandsbasierte Lasersensoren
Überblick
Dieser Sensortyp erkennt die Position eines Zielobjektes über den Abstand bzw. die Höhe. Er nutzt hierfür entweder ein Triangulationsverfahren oder die Erkennung der Lichtlaufzeit.
Funktionsprinzip und wesentliche Sensortypen
Triangulation
Mit Änderung des Abstands zum Zielobjekt ändert sich auch die Position des fokussierten Lichtpunkts auf dem Lichtaufnahmeelement (CMOS). Die Position des Lichtpunkts auf dem CMOS wird dann zur Bestimmung der tatsächlichen Position des Zielobjektes verwendet.

Der Laserstrahl wird auf das Zielobjekt ausgerichtet (siehe Abbildung oben). Das vom Zielobjekt reflektierte Licht wird von der Empfängerlinse gebündelt und auf dem Lichtaufnahmeelement abgebildet. Ändert sich der Abstand, wird das gebündelte Licht in einem anderen Winkel reflektiert und die Position des Lichtpunkts auf dem Lichtaufnahmeelement ändert sich entsprechend.
Lichtlaufzeit (TOF)
Die Erkennung des Abstandes erfolgt durch die Zeitdifferenz, die zwischen dem Senden und Empfangen eines Lichtimpulses vergeht. Dabei bleibt die Erkennung unbeeinflusst vom Material oder der Oberflächenbeschaffenheit des Zielobjekts.
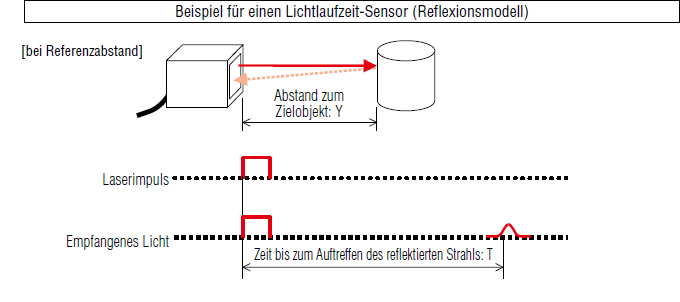
In der Abbildung rechts berechnet der Sensor den Abstand (Y) über die Zeit (T), die zwischen dem Senden und Empfangen des reflektierten Lichtstrahls vergeht. Berechnungsformel: Y (Abstand zum Zielobjekt) = 1/2 x C (Lichtgeschwindigkeit) x T (Zeit bis zum Auftreffen des reflektierten Strahls)

-
Erkennung basiert auf „Lichtmenge“
Merkmale intensitätsbasierter Lasersensoren
Lasersensoren:Erkennung über die Lichtmenge -
Erkennung basiert auf „Lichtmenge“
Merkmale abstandsbasierter Lasersensoren
Lasersensoren: Erkennung über Abstand und Distanzen



















