Warunkiem zmierzenia celu laserowym czujnikiem przemieszczenia jest zdolność wykrycia przez odbiornik światła odbitego od obiektu. W systemach pomiaru opartych na metodzie triangulacji głowice czujnika są montowane pod kątem umożliwiającym prawidłowe wykrycie odbitego światła, zależnie od właściwości powierzchni obiektu.
A) Z nieprzezroczystymi obiektami
Obiekt i głowica czujnika są montowane równolegle do siebie.
Część rozproszonego światła jest wykrywana przez odbiornik.
B) Z przezroczystymi obiektami
Czujnik jest montowany tak, aby kąt padania był równy kątowi odbicia.
Odbicie lustrzane światła jest wykrywane przez odbiornik.
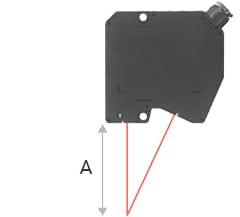
Odległość referencyjna
Odległość referencyjna jest domyślny punkt zerowy głowicy czujnika. Jest on zazwyczaj reprezentowany jako odległość od dna głowicy czujnika do środka zakresu pomiaru.
A
Odległość referencyjna
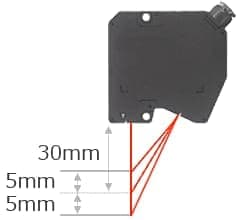
Zakres pomiaru
Zakres pomiaru to zakres, w którym czujnik jest w stanie wykonywać pomiar. Zakresy pomiaru są zazwyczaj opisywane jako ±xx mm względem odległości referencyjnej.
[Przykład]
Odległość referencyjna: 30 mm
Zakres pomiaru: ±5 mm
Laserowy czujnik przemieszczenia, który jest opisany powyżej, może mierzyć obiekty w następującym zakresie.
Źródło światła
W bezkontaktowych systemach pomiaru nadajnik rzuca światło na obiekt, a odbite światło jest przechwytywane przez odbiornik. Światło to może pochodzić z różnych źródeł światła, w tym czerwonych laserów półprzewodnikowych, niebieskich laserów półprzewodnikowych, białego światła, diod superluminescencyjnych i zielonych diod LED. Rodzaj źródła światła zależy od zasady działania systemu pomiaru. Użycie odpowiedniej do danego źródła światła soczewki lub elementu odbierającego światła zwiększa potencjalną precyzję pomiaru.
Średnica plamki
W bezkontaktowych systemach pomiaru rozróżnia się generalnie dwa rodzaje plamek wiązki światła, czyli o eliptyczne i okrągłe. Eliptyczne plamki służą do mierzenia średnich wysokości w danym obszarze i są mniej podatne na wpływ czynników wynikających z chropowatości powierzchni. Jednak im większa jest powierzchnia plamki, tym mniej nadaje się ona do profilowania kształtów lub mierzenia małych obiektów. Natomiast okrągła plamka, ponieważ jest mniejsza, odznacza się większą skutecznością wykonywania tych badań.
Eliptyczna plamka.
Okrągła plamka
Powtarzalność
Powtarzalność reprezentuje ogólną różnicę zmierzonych wartości uzyskanych w tej samej lokalizacji na obiekcie.
Liniowość
Liniowość jest wyznacznikiem zdolności systemu pomiaru. Wartość ta reprezentuje maksymalną wartość błędu między idealną wartością a rzeczywistym wynikiem pomiaru. Jeśli na przykład obiekt zostanie przemieszczony o 1 mm przy użyciu systemu pomiaru o liniowości ±5 µm, wskazywana wartość może zawierać margines błędu ±5 µm (np od 9,995 µm do 1,005 µm). Parametry liniowości są definiowane jako ±○○% względem pełnej skali, gdzie pełna skala oznacza zakres pomiaru. Obliczenie jest wykonywane w następujące sposób. Logiczne jest stwierdzenie, że systemy pomiaru o mniejszej liniowości są lepsze.
Jeśli na przykład system pomiaru odznacza się liniowością na poziomie 0,02% pełnej skali, a zakres pomiaru wynosi ±3 mm (pełna skala = 6 mm), to liniowość wynosi 0,02% × 6 mm = ±1,2 µm.
Wykres liniowości
X
Odległość
Y
Napięcie
A
Liniowość
B
Rzeczywista wartość
C
Idealna linia
Charakterystyka temperaturowa
Charakterystyka temperaturowa reprezentuje maksymalną wartość błędu występującego, gdy temperatura głowicy czujnika zmieni się o jeden stopień. Wewnątrz głowicy czujnika znajduje się obiektyw i czujnik CMOS, a także obsady do mocowania tych elementów. Zmiany temperatury powodują rozszerzanie i kurczenie się tych elementów, a w konsekwencji zmianę położenia padania obrazu na matrycę CMOS i błędy. Charakterystyka temperaturowa jest definiowana jako ±○○% pełnej skali na °C, gdzie pełna skala reprezentuje zakres pomiaru. Obliczenie jest wykonywane w następujące sposób. Logiczne jest stwierdzenie, że systemy pomiaru o mniejszej charakterystyce temperaturowej są lepsze. Jeśli na przykład charakterystyka temperaturowa systemu pomiaru wynosi 0,01% na °C, a zakres pomiaru ±3 mm (pełna skala = 6 mm), to liniowość wynosi 0,01% × 6 mm = ±0,6 µm.
Światło otoczenia
Światło otoczenia oznacza maksymalne natężenie światła emitowanego przez zewnętrzne źródło światła, które nie będzie miało wpływu na pomiary wykonywane przez system pomiaru.
Temperatura otoczenia
Temperatura otoczenia oznacza, w jakiej temperaturze otoczenia zagwarantowana jest poprawność działania systemu pomiaru.
Wilgotność otoczenia
Wilgotność otoczenia oznacza, w jakiej wilgotności otoczenia zagwarantowana jest poprawność działania systemu pomiaru.
Odporność na drgania
Odporność na drgania to wskaźnik pokazujący, na ile drgania mają wpływ na system pomiaru. We wskazywanych wartościach jest podana przeprowadzona ocena. Na przykład ogólny opis „od 10 do 55 Hz, podwójna amplituda 1,5 mm, 2 h w każdym z kierunków X, Y i Z” oznacza, że zostały przeprowadzony następujący test. Drgania wytwarzane przez 2 godziny z częstotliwością od 10 do 55 Hz i amplitudą ±0,75 mm w kierunku X ⇓ Drgania wytwarzane przez 2 godziny z częstotliwością od 10 do 55 Hz i amplitudą ±0,75 mm w kierunku Y ⇓ Drgania wytwarzane przez 2 godziny z częstotliwością od 10 do 55 Hz i amplitudą ±0,75 mm w kierunku Z
Częstotliwość próbkowania / prędkość próbkowania
Częstotliwość próbkowania / prędkość próbkowania oznacza liczbę punktów danych, które system pomiaru jest w stanie zarejestrować w ciągu sekundy. System pomiaru o częstotliwości próbkowania 100 Hz może wykonywać 100 pomiarów w ciągu 1 sekundy. Systemy pomiaru o większej częstotliwości próbkowania są w stanie wykonywać bardziej precyzyjne pomiary obiektu za pomocą pomiaru liniowego, a ponieważ wiele procesów uśredniania może być wykonywanych jednocześnie, pomiary będą stabilne.
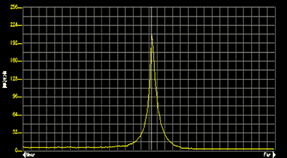
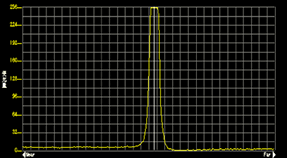
Przebieg fali odbieranego światła
Przebieg fali odbieranego światła oznacza stan światła odbieranego przez element odbierający światło. Na pionowej osi odwzorowana jest siła światła, a pozioma oś przedstawia położenie na elemencie odbierającym światło. Kontrola kształtu przebiegu fali odbieranego światła umożliwia stwierdzenie, czy dany pomiar jest wykonywany dokładnie.
(1) Idealny przebieg fali odbieranego światła
Ten przebieg fali odbieranego światła pozwala na stabilny pomiar.
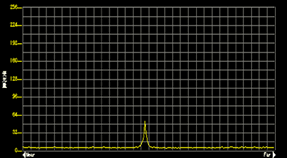
(2) Mała wysokość przebiegu fali odbieranego światła
Pomiaru nie można wykonać, ponieważ została przechwycona zbyt mała ilość odbitego światła.
(3) Nadmierna wysokość przebiegu fali odbieranego światła
Światło odbite odznacza się wysokim nasyceniem. W takich przypadkach wystąpią duże odchylenia zmierzonych wartości.
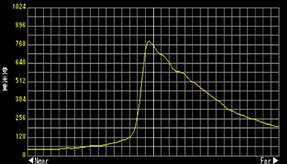
(4) Przebieg fali odbieranego światła nie jest symetryczny w poziomie
Podczas pomiaru żywic i podobnych materiałów wiązka lasera zanurza się w obiekt i przebieg fali odbieranego światła staje się asymetryczny w poziomie. W takich sytuacjach jest dokonywane przesuwanie zmierzonych wartości, aby zrekompensować wielkość zanurzenia od rzeczywistej wartości.
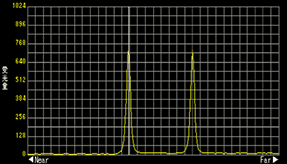
(5) Wiele przebiegów fali odbieranego światła
Podczas pomiaru przezroczystych obiektów, jak szkło, występuje więcej niż jeden szczyt. Podczas pomiaru szkła mogą zostać uzyskane dwa szczyty: jeden odbity od górnej powierzchni, a drugi odbity od tylnej powierzchni.
Oś optyczna, region osi optycznej
Środkowa oś światła emitowanego z nadajnika systemu pomiaru jest nazywana osią optyczną. Na wykresie regionu osi optycznej jest przedstawiona droga światła od nadajnika do odbiornika. Ponieważ światło nie dociera do obiektu ani odbiornika, jeśli obsada lub inny obiekt znajdzie się w tym regionie, pomiar nie będzie możliwy.
Wykres regionu osi optycznej
Napięcie zasilania
Napięcie zasilania to napięcie, które jest niezbędne, aby urządzenie mogło pracować. Wartość znamionowa 24 V DC ±10% oznacza, że jest wymagane zasilanie prądem stałym o napięciu 24 V z wahaniami nie większymi niż ±2,4 V.
Maksymalny pobór prądu
Maksymalny pobór prądu oznacza ilość prądu, która jest zużywana podczas pracy urządzenia. Musi zostać wybrane urządzenie z zasilaczem o mocy większej niż maksymalny pobór prądu.